
Projet LaMé – Impression 3D béton
Contexte
En troisième année de BUT génie mécanique, nous avons eu l’opportunité de travail sur un projet très innovant basée autour de l’impression 3D béton. Le projet s’est déroulé en collaboration avec le Laboratoire de Mécanique Gabriel LaMé, un centre de recherche reconnu et spécialisé dans l’étude de la mécanique des matériaux et des structures. L’une de leurs vocations est d’anticiper les défis industriels en explorant les procédés de fabrication et d’ingénierie de demain.
Au cœur de leurs axes de recherche se trouve une technologie de pointe : l’impression 3D de ciment et de béton. Ce procédé d’avenir vise à révolutionner le secteur de la construction en permettant de réaliser des géométries complexes et d’optimiser la quantité de matière déposée dans les constructions.
C’est dans ce cadre d’innovation technologique que notre équipe d’étudiants en Génie Mécanique et Productique (GMP) a été sollicitée afin de réaliser différentes missions d’amélioration de l’implantation du procédé.


Laboratoire de Mécanique Gabriel LaMé
Introduction du projet
Objectifs et Problématique
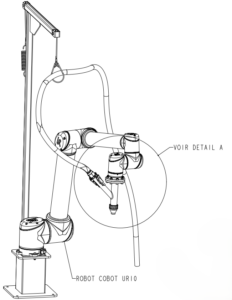
L’objectif principal de notre projet était d’optimiser l’implantation et l’utilisation d’un robot collaboratif (l’UR10e) dédié à l’impression 3D béton. Nous devions garantir la mise en place d’une zone d’impression qui soit à la fois fiable, répétable et évolutive. Toute notre réflexion s’est articulée autour d’une problématique centrale dictée par le laboratoire :
« Comment adapter un robot COBOT à un environnement dédié à l’impression 3D béton en garantissant la stabilité, la précision, l’ergonomie et la sécurité ? ».
L’Existant et le Défi du Projet
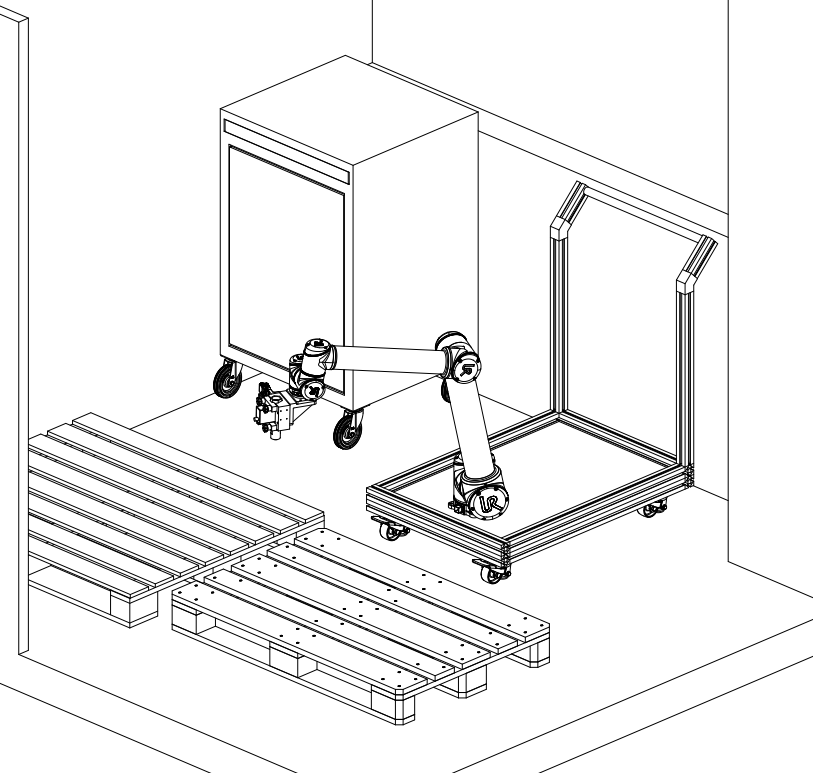
À notre arrivée, l’installation existante présentait plusieurs limites logistiques et techniques : le robot UR10e sur son chariot, la pompe à béton et des palettes en bois de fortune encombraient un espace d’atelier déjà très restreint. L’enjeu est devenu encore plus grand lorsque le laboratoire nous a fait part de sa volonté d’installer un second robot industriel, le ROKAE CR20, pour pousser plus loin ses recherches et ses travaux pratiques
Nous avons tout d’abord réalisé un modèle 3D complet de l’atelier sur le logiciel CREO. Ce jumeau numérique nous a permis de simuler les sphères de mouvement des robots pour éviter les collisions et optimiser l’espace de travail.

Réalisation d’un jumeau numérique complet
Nos Missions (Notre rôle en tant que GMP)
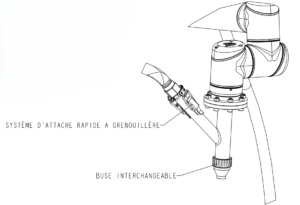
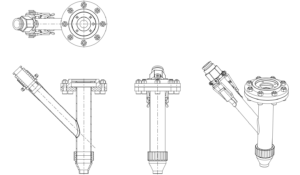
- Conception d’une nouvelle Buse d’impression : L’ancienne installation était soumise à l’usure et manquait de précision. Nous avons conçu une nouvelle tête d’impression interchangeable dotée d’un système d’attache rapide, offrant une grande rigidité et une approche beaucoup plus industrielle.
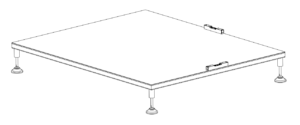
- Dimensionnement d’une Palette robuste : Pour remplacer les palettes en bois qui se déformaient sous le poids, nous avons modélisé et simulé les efforts sur une nouvelle structure capable de supporter une charge de béton allant jusqu’à 350 kg avec une déformation minimum.
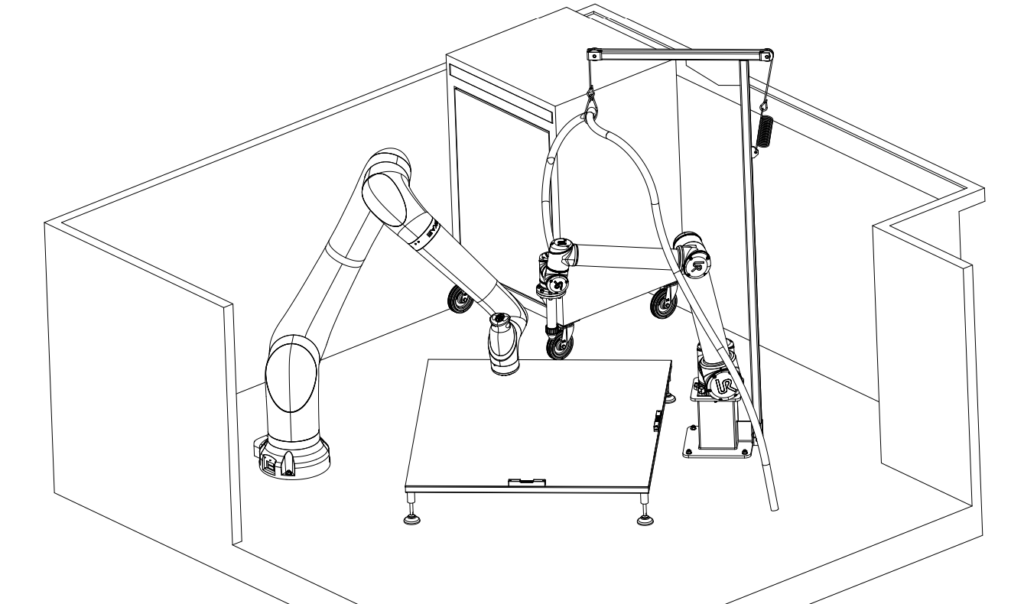
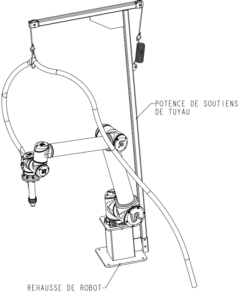
- Intégration d’une Potence : Nous avons également travaillé sur la conception d’une potence pour soutenir le poids du tuyau d’alimentation en béton, évitant ainsi qu’il ne pèse sur l’axe du robot et n’entrave sa précision
.
De l’Idéation à la Réalisation :
1 – Brainstorming et Mise en Concurrence Interne
Pour concevoir la meilleure cellule robotisée possible, nous avons choisi une approche originale : diviser notre équipe en deux sous-groupes. L’objectif était de créer une véritable émulation et une mise en concurrence saine afin de multiplier les idées.
Chaque groupe a ainsi imaginé sa propre version de l’atelier idéal, en y intégrant les deux robots (l’UR10e et le nouveau ROKAE CR20), une nouvelle palette en acier robuste, ainsi qu’une potence indispensable pour soutenir le tuyau d’alimentation.
Pour cette première implantation nous avons décidé d’intégrer une réhausse métallique afin de gagner en hauteur de volume d’impression ainsi qu’une potence en profilé qui permet de soutenir le tuyau d’arrivée du béton.
Première implantation d’essais (V1)
2 – Concertation et Répartition des Tâches
À l’issue de cette phase de recherche, nous avons organisé une réunion de projet décisive avec les techniciens, nos professeurs et les chercheurs du laboratoire LaMé. Cette concertation nous a permis de débattre de nos propositions, de prendre en compte de nouvelles contraintes émises par le laboratoire, et de fusionner les meilleures idées des deux groupes pour aboutir à une solution globale optimale
Pour gagner en efficacité dans le développement de cette solution finale, nous avons réparti le travail en créant trois pôles d’expertise distincts :
- Le pôle « Palette » : Chargé de la modélisation et du dimensionnement de la nouvelle structure en acier.
- Le pôle « Buse » : Concentré sur le développement de la nouvelle tête d’impression.
- Le pôle « Implantation et Supports » : Responsable de la conception de la potence, du système de rehausse pour les robots, et de l’agencement global de l’atelier via notre jumeau numérique.
.
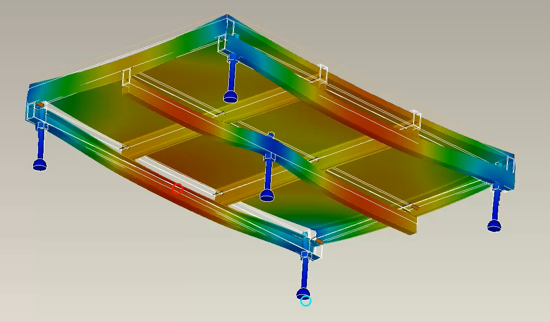
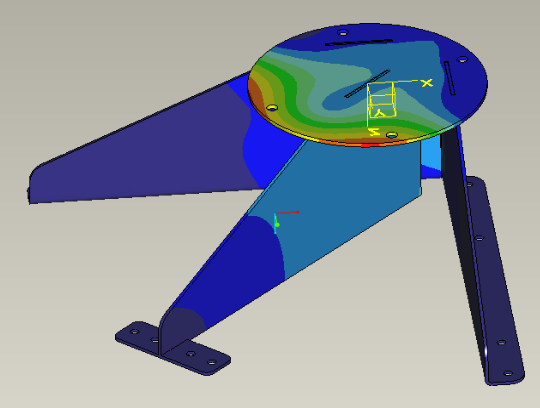
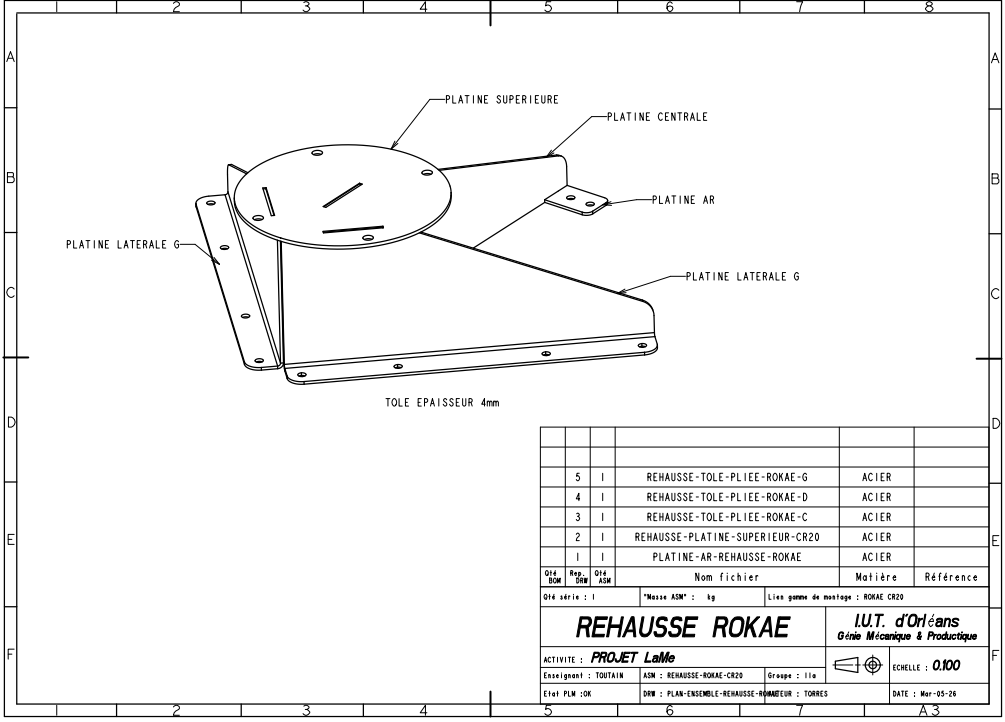
Simulations et plans réalisés lors de des études des différentes solutions
3 – Résultat final
la validation des solutions et la modélisation CAO sont achevées. Nous sommes pleinement entrés dans la dernière ligne droite de notre projet : la phase de fabrication. Mon groupe finalise actuellement la concrétisation des pièces que nous avons conçues pour la potence et l’intégration des robots.
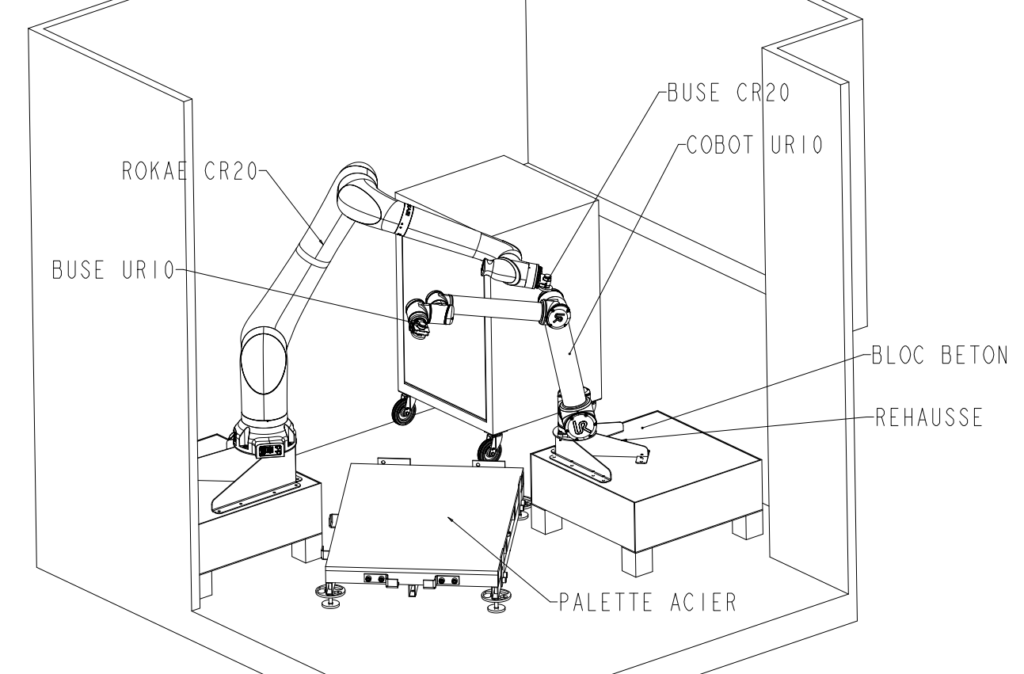
Implantation finale du robot (sans la potence)