
Conception d’un engrenage conique hélicoïdal entièrement paramétrique sur Creo 10.0
Cette page présente la conception d’un engrenage conique hélicoïdal entièrement paramétrique réalisé sur Creo 10.0 au cours de ma formation en BUT Génie Mécanique et Productique, parcours Innovation pour l’Industrie.
Ce projet m’a permis de mobiliser et d’approfondir de nombreuses compétences acquises durant le BUT GMP, notamment en conception mécanique, CAO paramétrique, chaîne de cotation, modélisation géométrique complexe, calcul mécanique et logique de développement industriel.
Présentation du projet
Pendant près d’un an, j’ai développé un système entièrement paramétrique permettant de générer automatiquement un engrenage conique hélicoïdal sur Creo Parametric 10.0.
L’objectif du projet était de créer un modèle capable de reconstruire automatiquement une transmission complète uniquement à partir de six paramètres d’entrée :
- SIGMA → angle entre les deux axes
- M → module de denture
- ALPHA → angle de pression
- BETA → angle d’hélice
- Z1 → nombre de dents du pignon
- Z2 → nombre de dents de la couronne
À partir de ces seuls paramètres, l’ensemble de la géométrie est recalculé automatiquement :
- géométrie des cônes
- diamètres primitifs
- hauteurs de dents
- développantes de cercle
- hélice de denture
- volume de coupe
- répétitions circulaires
- assemblage complet
- animation d’engrènement
Le projet a été construit selon les méthodes de calcul issues du Fanchon Industriel 2019-2020 (GDI) et des normes ISO de conception des engrenages coniques.
Extrait de la page 349 du GDI 2019-2020 Jean Louis FANCHON
1 — Phase de recherche et de calcul
Avant toute modélisation, une importante phase théorique a été nécessaire.
L’objectif était de reconstruire entièrement la logique géométrique d’un engrenage conique hélicoïdal afin de pouvoir ensuite automatiser sa génération dans Creo.
Étude des formules fondamentales
Cette étape consistait à :
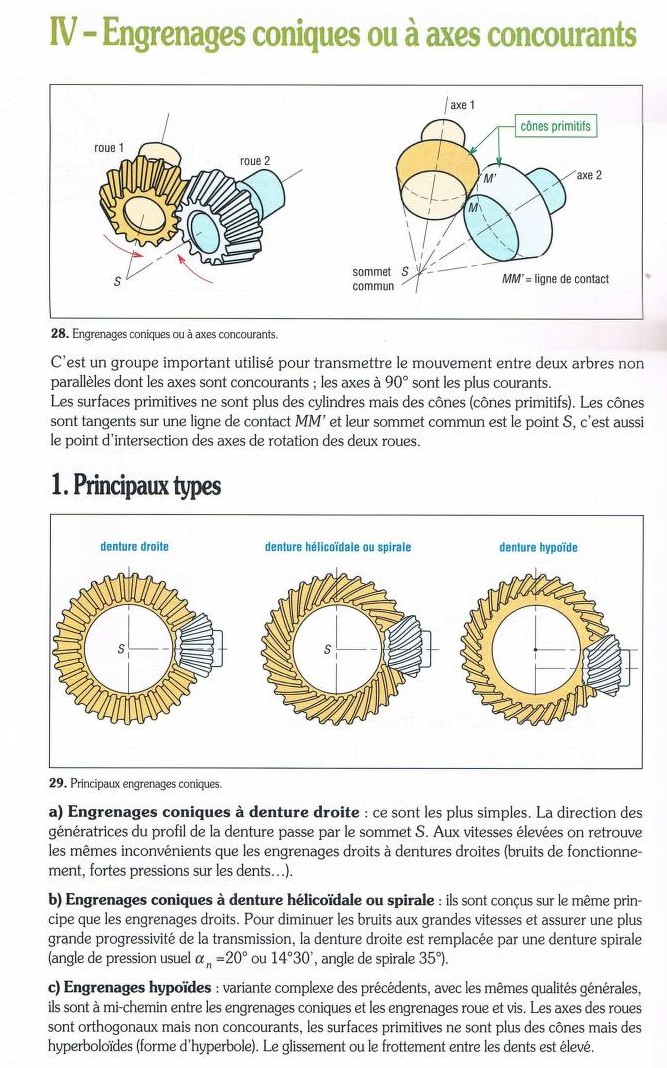
- comprendre la géométrie des engrenages coniques
- étudier la construction des développantes de cercle
- calculer les cônes primitifs, de tête et de pied
- définir les hauteurs de denture
- construire une hélice adaptée à une géométrie conique
- respecter les normes ISO de conception d’engrenage
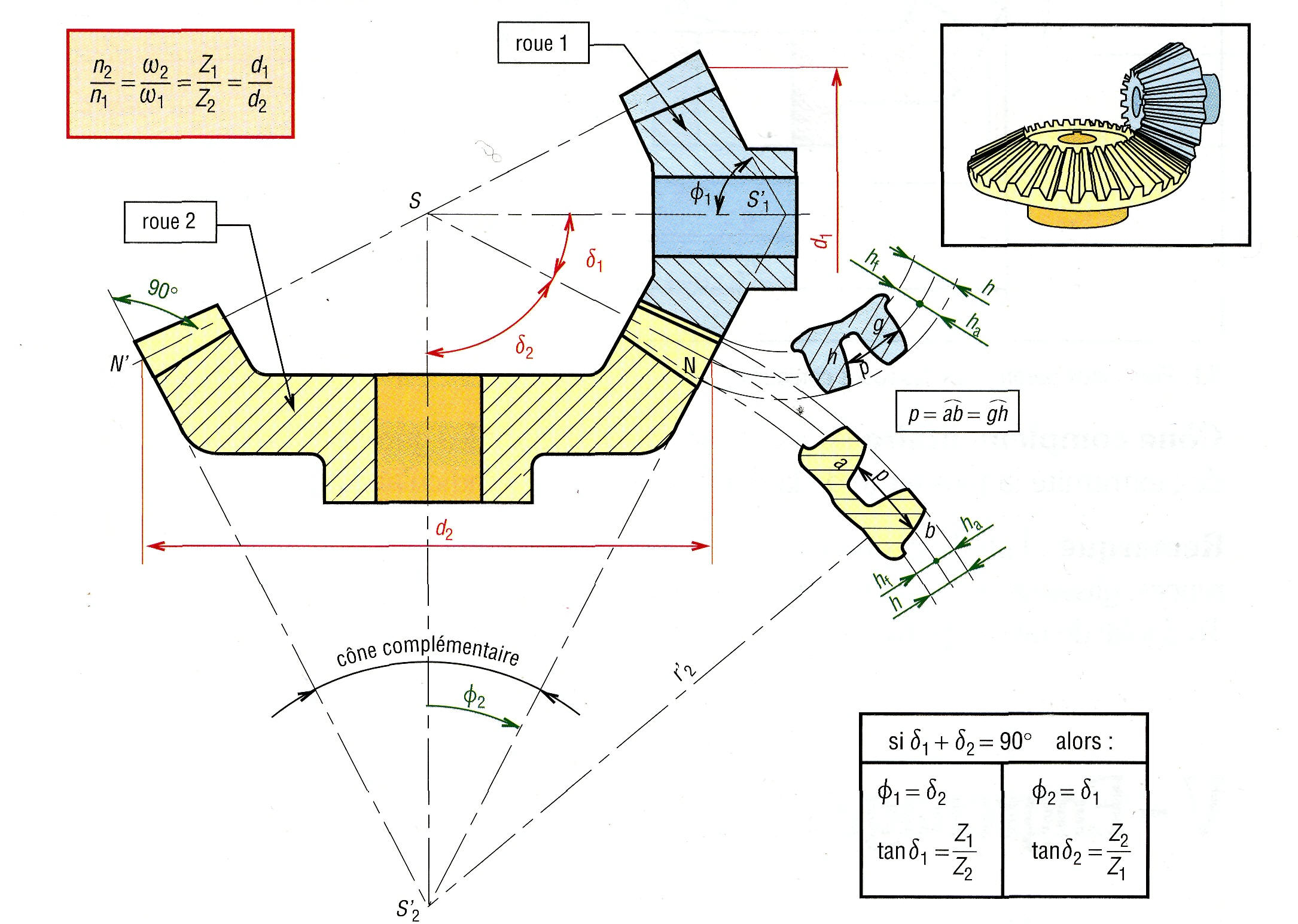
Extrait de la page 350 du GDI 2019-2020 Jean Louis FANCHON
2 — Construction paramétrique de la couronne
Une fois tous les calculs validés, la phase de modélisation sur Creo a commencé.
L’idée générale du projet est importante :
Le modèle ne construit pas directement les dents. Il construit d’abord le volume de matière à retirer entre les dents.
Cette méthode a permis d’obtenir une denture beaucoup plus stable et robuste lors des changements de paramètres.
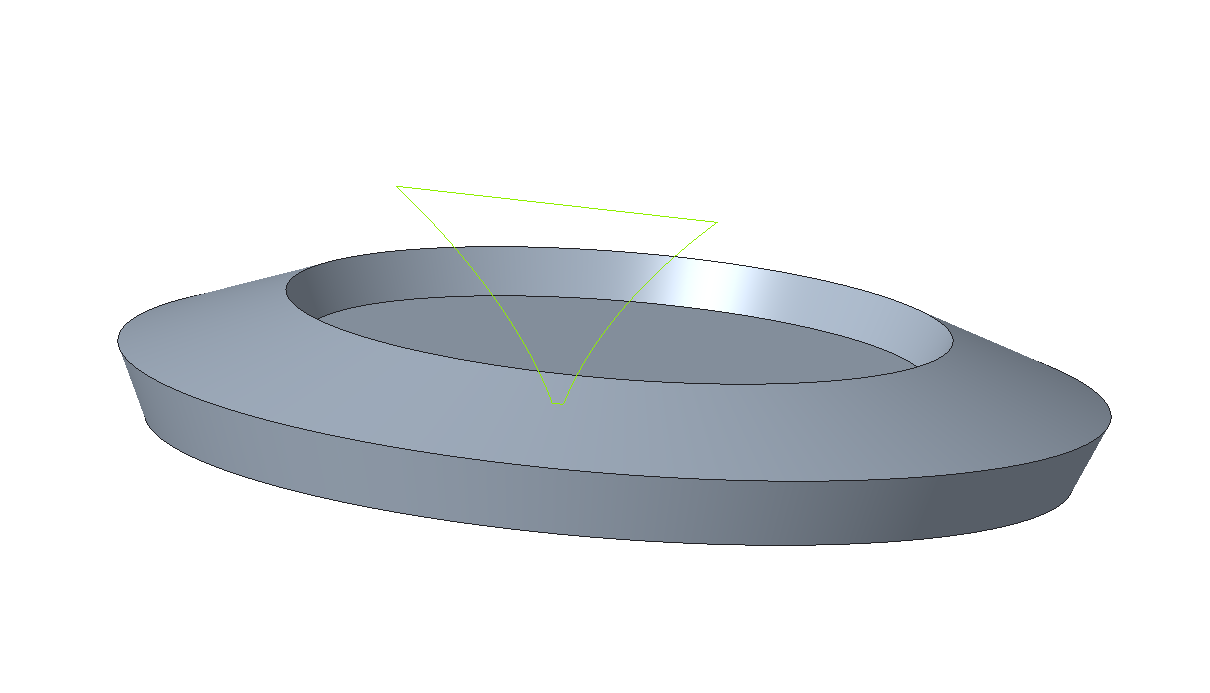
2.1 — Construction du cône principal
La première étape consiste à générer le volume conique principal de la couronne.
À partir des paramètres calculés précédemment, plusieurs géométries sont définies :
- cône primitif
- cône de tête
- cône de pied
- diamètre de tête
- diamètre primitif
- diamètre de pied
2.2 — Construction de la denture arrière
La première étape consiste à générer le volume conique principal de la couronne.
À partir des paramètres calculés précédemment, plusieurs géométries sont définies :
- cercle de tête
- cercle primitif
- cercle de pied
Sur ces références vient ensuite se placer une développante de cercle. Cette développante définit la géométrie réelle du profil de dent suivant l’angle de pression Alpha
Un décalage paramétrique est ensuite appliqué afin de contrôler correctement l’épaisseur de dent selon le module. Sans ce décalage, l’épaisseur des dents ne suivrait pas les variations du module et la denture deviendrait incorrecte.
2.3 — Construction de la denture avant
Le même principe est utilisé pour la denture avant.
La développante est recalculée puis repositionnée afin d’obtenir un alignement parfait avec la géométrie conique.
L’objectif était d’obtenir :
- une denture parfaitement paramétrique
- une épaisseur constante
- une reconstruction stable lors des changements de paramètres
2.4 — Génération de l’hélice de denture
L’étape suivante consiste à générer l’hélice permettant de guider la future denture hélicoïdale. Cette hélice est construite grâce à une relation paramétrique.
La génératrice utilisée est :
Z = hauteur_cone - hauteur_cone*T
X = -Z*TAN(DELTA2)*SIN(TWIST*T)
Y = Z*TAN(DELTA2)*COS(TWIST*T)
Y = -Yavec
LEAD = (PI*diam_prim*COS(DELTA2))/TAN(BETA)
TWIST = hauteur_cone/LEAD*360Cette relation permet de créer une hélice conique adaptée à la géométrie de l’engrenage.
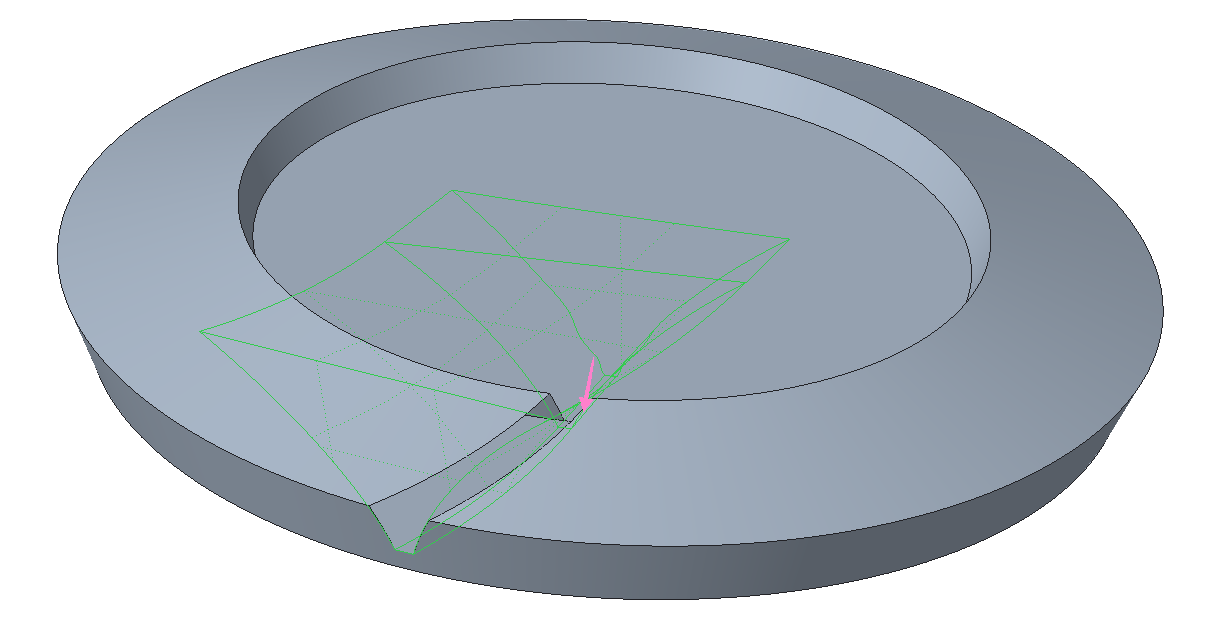
2.5 — Création du volume de denture
Une fois les profils correctement positionnés et la génératrice terminée, il devient possible de créer le volume de coupe.
Le balayage suit alors :
- la denture arrière
- la denture intermédiaire
- la denture avant
- la génératrice hélicoïdale
L’une des principales difficultés du projet provenait de cette étape. Au début, la denture ne suivait pas correctement la trajectoire hélicoïdale. Le modèle devenait instable.
Après de nombreux essais, une denture intermédiaire a été ajoutée afin de stabiliser complètement le balayage.
2.6 — Répétition circulaire des dents
Une fois une seule empreinte de dent fonctionnelle, une répétition circulaire est appliquée.
Le nombre de répétitions dépend directement du paramètre :
Z1pour le pignonZ2pour la couronne
L’ensemble de la denture se reconstruit automatiquement quelle que soit la configuration choisie.
J’ai aussi ajouté des perçages paramétrique ainsi qu’un alésage.

3 — Construction du pignon
Une fois la couronne validée, le même processus a été reproduit pour le pignon.
Toutes les relations paramétriques ont été adaptées afin que les deux composants restent totalement synchronisés.
Chaque modification des paramètres met automatiquement à jour :
- les diamètres et le cône
- les angles
- les dentures
- l’hélice
- le rapport de transmission

4 — Paramétrage de l’assemblage
La dernière étape consistait à créer un assemblage entièrement paramétrique.
Les paramètres globaux de l’assemblage pilotent directement ceux des deux pièces.
SIGMA:0 = SIGMA
M:0 = M
ALPHA:0 = ALPHA
Z1:0 = Z1
Z2:0 = Z2
BETA:0 = BETA
SIGMA:2 = SIGMA
M:2 = M
ALPHA:2 = ALPHA
Z1:2 = Z1
Z2:2 = Z2
BETA:2 = BETA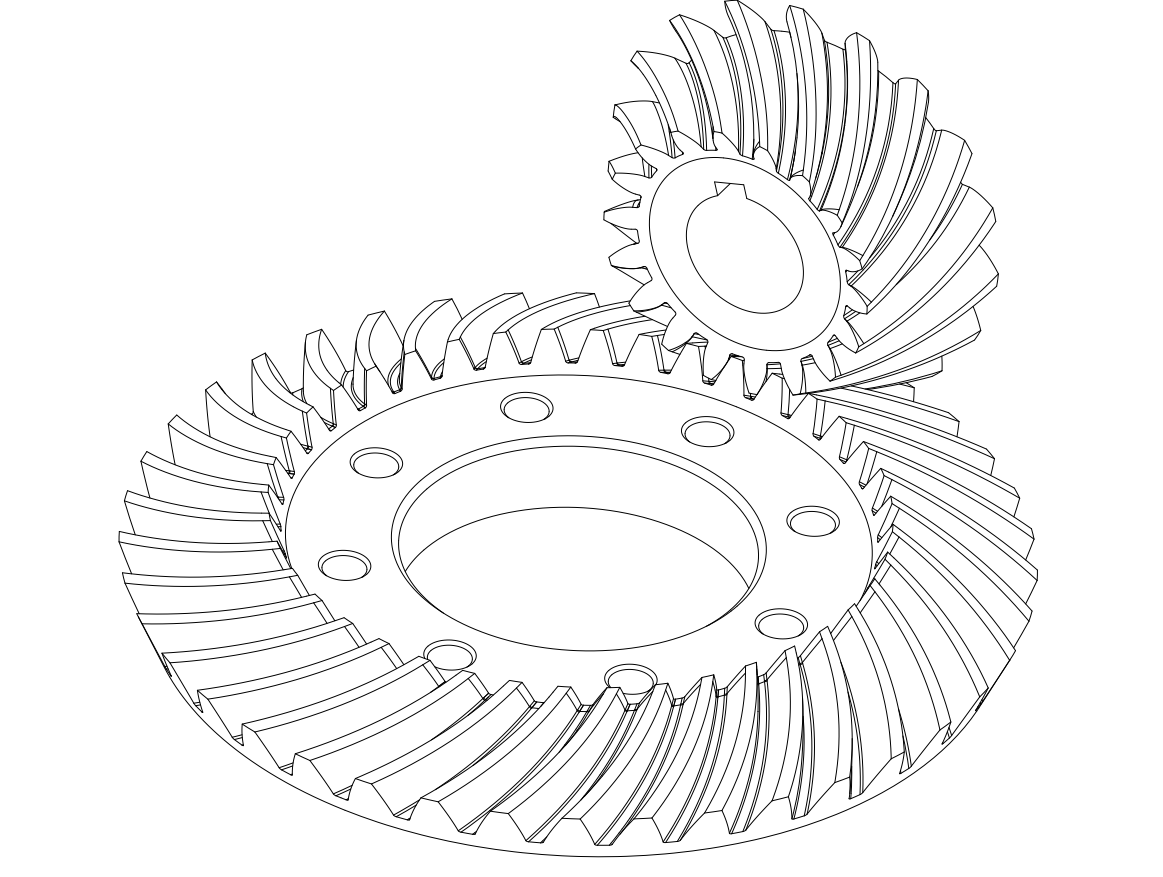
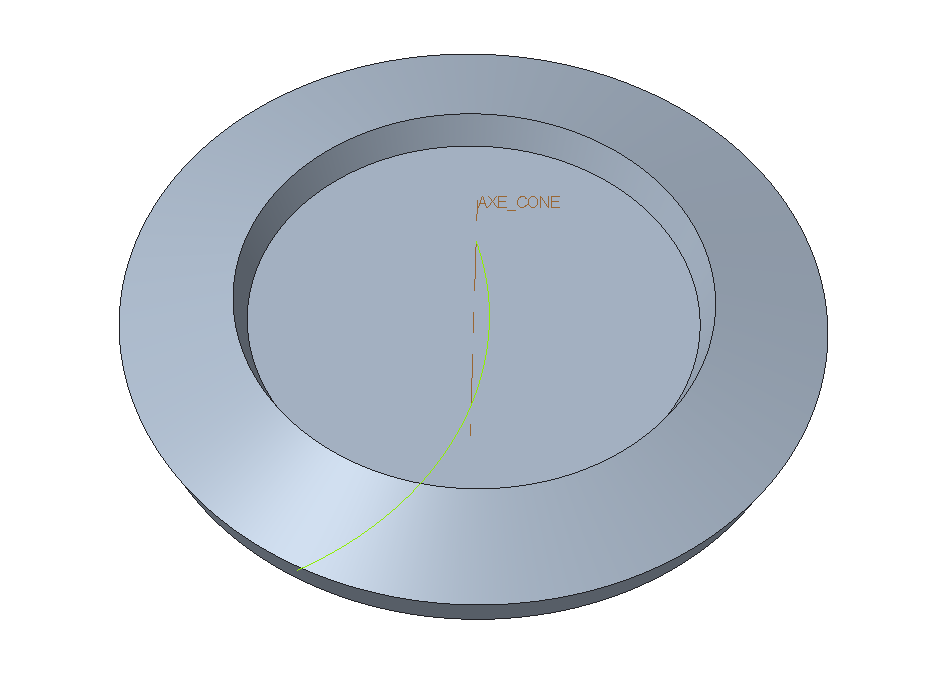
Gestion des axes
L’axe du pignon a été construit de manière à passer exactement par le sommet commun des deux cônes primitifs.
Cette contrainte est essentielle dans un engrenage conique.
Le premier axe est défini comme référence principale.
Le second est automatiquement recalculé selon l’angle SIGMA.
Animation et engrènement
Une fois l’assemblage finalisé, le rapport de transmission a été paramétré directement dans Creo.
Le système permet alors :
- l’animation complète de l’engrenage
- le calcul automatique du rapport de rotation
- la vérification de l’engrènement
- la validation cinématique
5 — Résultat final
Le résultat final est un engrenage conique hélicoïdal entièrement paramétrique capable de se reconstruire automatiquement à partir de seulement six paramètres.
Ce projet m’a permis de développer :
- une forte maîtrise de Creo Parametric
- une compréhension avancée de la conception des engrenages coniques
- des compétences en modélisation paramétrique complexe
- une logique de calcul proche des outils industriels (Gleason)